初识GPU编程
初识GPU编程
在GPU软硬件基础知识部分我们介绍过一些概念,这里我们再次重申一些GPU编程时所涉及的重要概念。
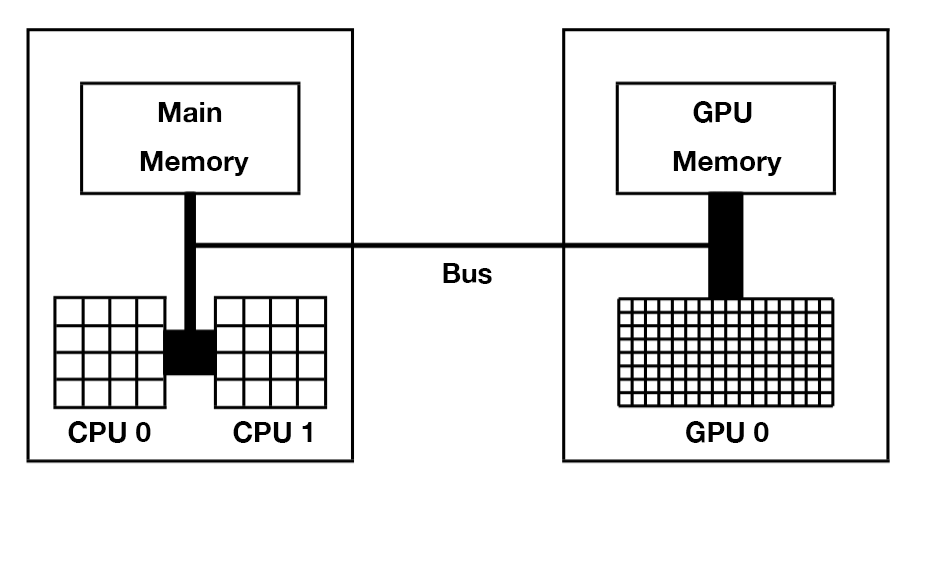
在CUDA中,CPU和主存被称为主机(Host),GPU和显存(显卡内存)被称为设备(Device),CPU无法直接读取显存数据,GPU无法直接读取主存数据,主机与设备必须通过总线(Bus)相互通信。
在进行GPU编程前,需要先确认是否安装了CUDA工具箱,可以使用echo $CUDA_HOME检查CUDA环境变量,返回值不为空说明已经安装好CUDA。也可以直接用Anaconda里的conda命令安装CUDA:
$ conda install cudatoolkit
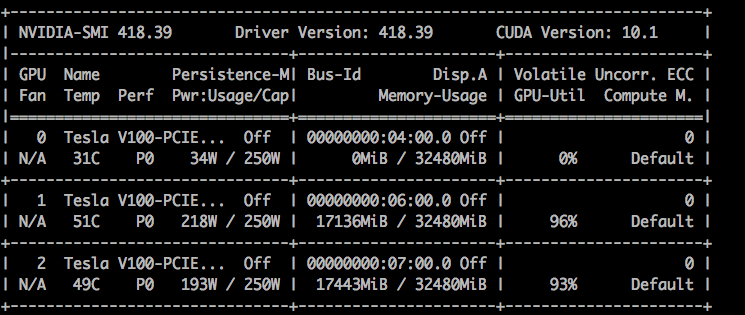
然后可以使用nvidia-smi命令查看显卡情况,比如这台机器上几张显卡,CUDA版本,显卡上运行的进程等。我这里是一台32GB显存版的Telsa V100机器。
安装好CUDA之后,继续安装Numba库:
$ conda install numba
检查一下CUDA和Numba是否安装成功:
from numba import cuda
print(cuda.gpus)
如果上述步骤没有问题,可以得到结果:<Managed Device 0>...。如果机器上没有GPU或没安装好上述包,会有报错。CUDA程序执行时会独霸一张卡,如果你的机器上有多张GPU卡,CUDA默认会选用0号卡。如果你与其他人共用这台机器,最好协商好谁在用哪张卡。一般使用CUDA_VISIBLE_DEVICES这个环境变量来选择某张卡。如选择5号GPU卡运行你的程序。
CUDA_VISIBLE_DEVICES='5' python example.py
如果手头暂时没有GPU设备,Numba提供了一个模拟器,供用户学习和调试,只需要在命令行里添加一个环境变量。
Mac/Linux:
export NUMBA_ENABLE_CUDASIM=1
Windows:
SET NUMBA_ENABLE_CUDASIM=1
需要注意的是,模拟器只是一个调试的工具,在模拟器中使用Numba并不能加速程序,有可能速度更慢,而且在模拟器能够运行的程序,并不能保证一定能在真正的GPU上运行,最终还是要以GPU为准。
有了以上的准备工作,我们就可以开始我们的GPU编程之旅了!
GPU程序与CPU程序的区别
一个传统的CPU程序的执行顺序如下图所示:
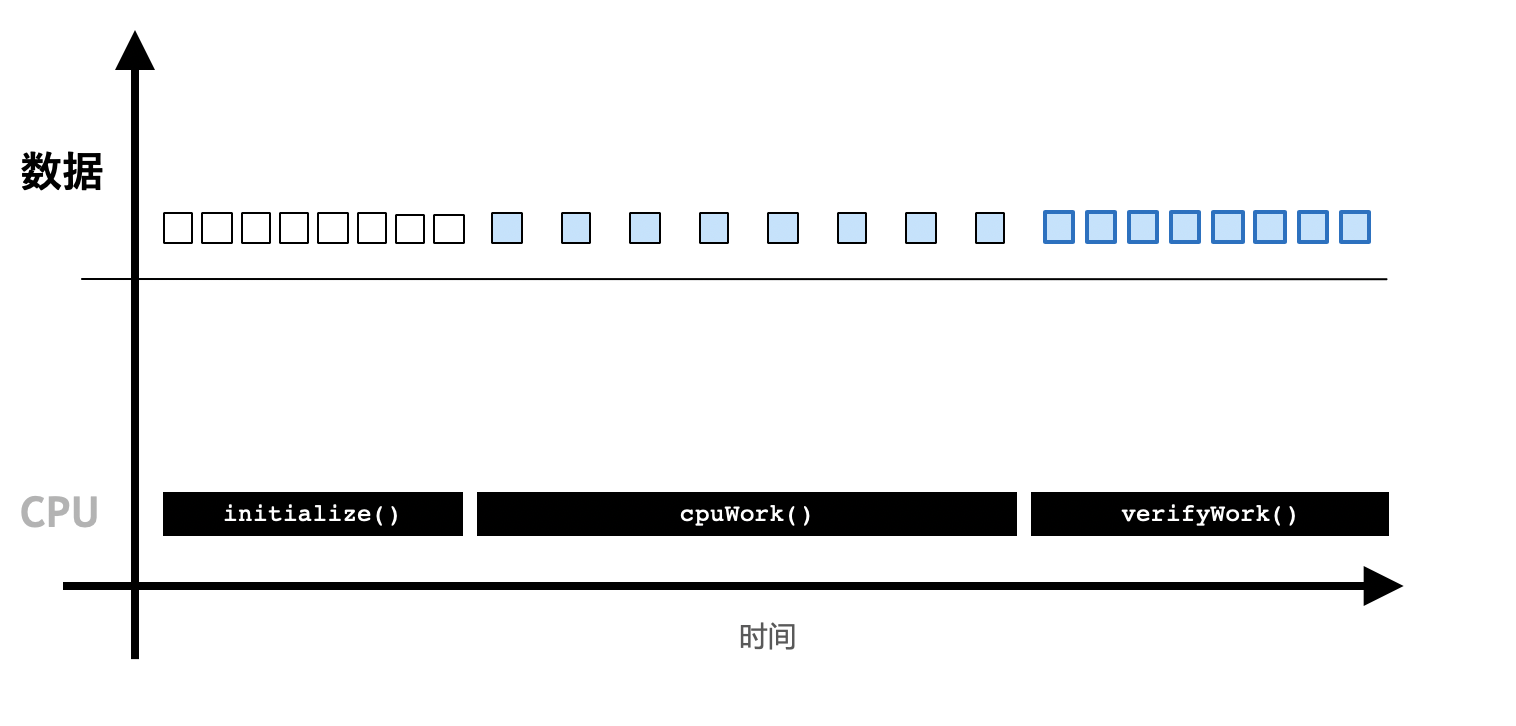
CPU程序是顺序执行的,一般需要:
初始化。
CPU计算。
得到计算结果。
在CUDA编程中,CPU和主存被称为主机(Host),GPU被称为设备(Device)。
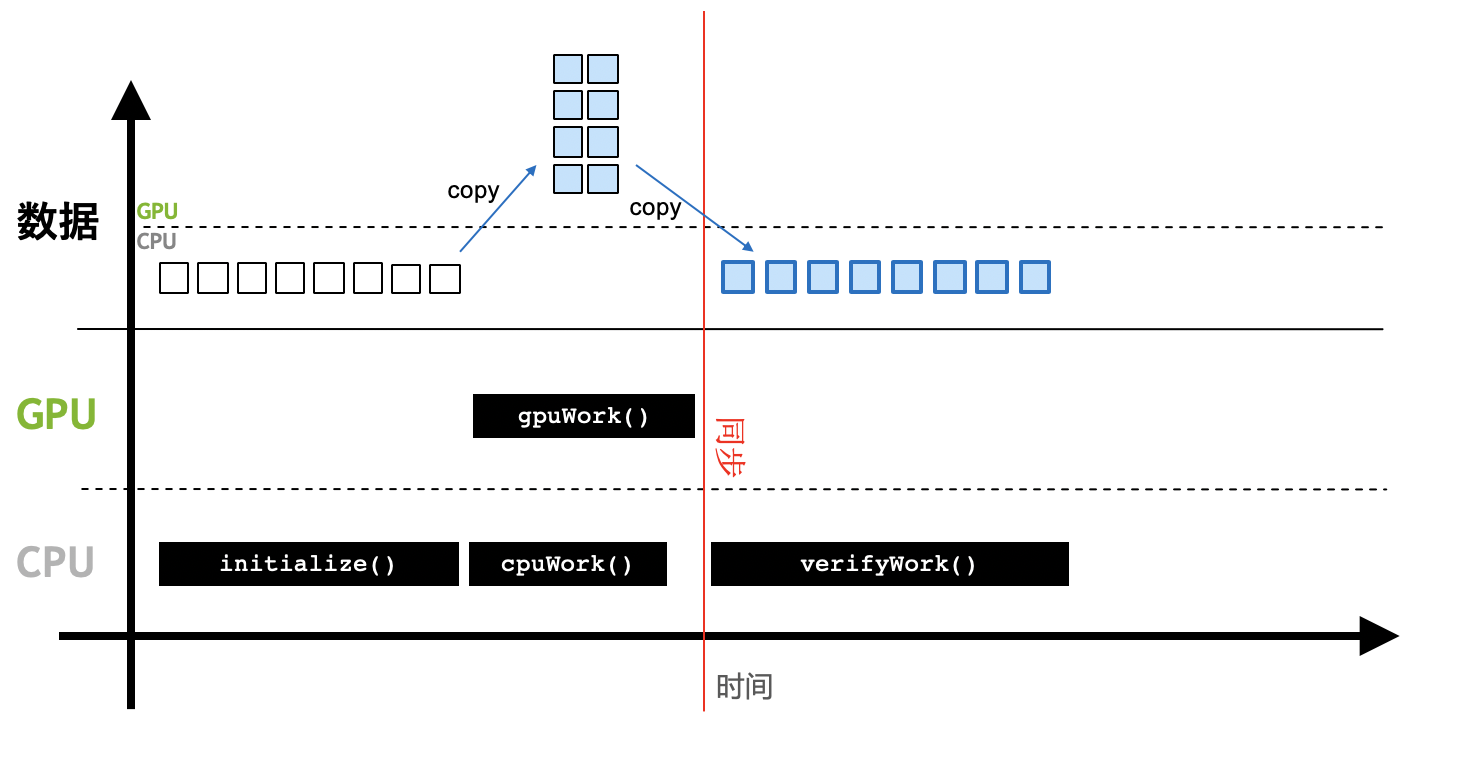
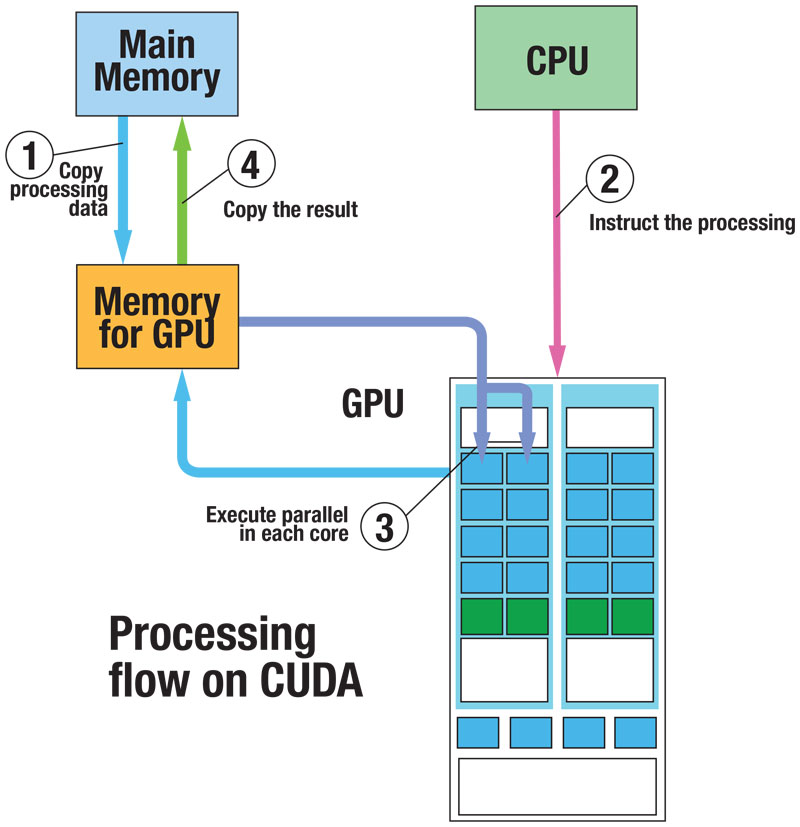
当引入GPU后,计算流程变为:
- 初始化,并将必要的数据拷贝到GPU设备的显存上。
- CPU调用GPU函数,启动GPU多个核心同时进行计算。
- CPU与GPU异步计算。
- 将GPU计算结果拷贝回主机端,得到计算结果。
一个名为gpu_print.py的GPU程序如下所示:
from numba import cuda
def cpu_print():
print("print by cpu.")
@cuda.jit
def gpu_print():
# GPU核函数
print("print by gpu.")
def main():
gpu_print[1, 2]()
cuda.synchronize()
cpu_print()
if __name__ == "__main__":
main()
使用CUDA_VISIBLE_DEVICES='0' python gpu_print.py执行这段代码,得到的结果为:
print by gpu.
print by gpu.
print by cpu.
与传统的Python CPU代码不同的是:
- 使用
from numba import cuda引入cuda库 - 在GPU函数上添加
@cuda.jit装饰符,表示该函数是一个在GPU设备上运行的函数,GPU函数又被称为核函数。 - 主函数调用GPU核函数时,需要添加如
[1, 2]这样的执行配置,这个配置是在告知GPU以多大的并行粒度同时进行计算。gpu_print[1, 2]()表示同时开启2个线程并行地执行gpu_print函数,函数将被并行地执行2次。下文会深入探讨如何设置执行配置。 - GPU核函数的启动方式是异步的:启动GPU函数后,CPU不会等待GPU函数执行完毕才执行下一行代码。必要时,需要调用
cuda.synchronize(),告知CPU等待GPU执行完核函数后,再进行CPU端后续计算。这个过程被称为同步,也就是GPU执行流程图中的红线部分。如果不调用cuda.synchronize()函数,执行结果也将改变,cpu_print函数将先被执行。虽然GPU函数在前,但是程序并没有等待GPU函数执行完,而是继续执行后面的cpu_print函数,由于CPU调用GPU有一定的延迟,反而后面的cpu_print先被执行,因此cpu_print的结果先被打印了出来。
前面的程序中,核函数被GPU并行地执行了2次。我们可以理解成,核函数以并行线程的方式来执行计算。
对于线程和并行计算不熟悉的朋友,这里再次做一个说明。我们仍然以加法计算为例,CPU就像大学数学教授,GPU就像几千个小学生,现在需要不借助外界,只通过纸笔,对2000个数字进行加法计算,得到1000个加法结果,在这个过程中,大学教授要协调指挥小学生完成任务。
在计算过程中,每个小学生需要按照大学教授的提出的规范,基于一个加法函数,完成计算。每个小学生就像GPU的一个计算核心,加法函数就是核函数,一个小学生完成本次计算就像一次线程计算。在整个计算过程中,只能通过纸笔交流,无论是计算任务本身,还是计算的中间结果都需要落地到纸上进行计算,作为记录的纸就像是计算机中的存储,
假设我们有2000个数字需要加到一起,得到1000个加法结果。如果只依赖20个大学教授,那每个教授需要执行50次计算,耗时很长。如果大学教授可以借助1000个小学生同时计算,那么大学教授可以这样设计GPU并行算法:
- 设计一个加法函数,加法函数可以将两个数字加在一起。
- 每个小学生分配2个数字,使用加法函数,对这2个数字执行计算。
- 大学教授给1000个小学生分配数字,并告知他们使用怎样的加法函数进行计算。
- 1000个小学生同时计算,得到1000个结果数字,写到纸上,返回给大学教授。
实际上,CUDA并行算法和上面的流程基本相似,就是设计核函数,在存储上合理分配数据,告知GPU以一定的并行度执行配置来并行计算。核函数的设计与所要解决的问题本身高度相关。接下来要重点讲解CUDA如何将核函数以线程的形式并行地执行。
Thread层次结构
在进行GPU并行编程时,需要定义执行配置来告知以怎样的方式去并行执行核函数。比如上面打印的例子中,是并行地执行2次,还是8次,还是并行地执行20万次,或者2000万次。2000万的数字太大,远远多于GPU的核心数,如何将2000万次计算合理分配到所有GPU核心上。解决这些问题就需要弄明白CUDA的Thread层次结构。

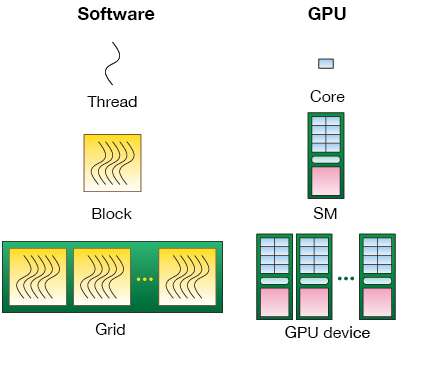
CUDA将核函数所定义的运算称为线程(Thread),多个线程组成一个块(Block),多个块组成网格(Grid)。这样一个Grid可以定义成千上万个线程,也就解决了并行执行上万次操作的问题。例如,把前面的程序改为并行执行8次:可以用2个Block,每个Block中有4个Thread。原来的代码可以改为gpu_print[2, 4](),其中方括号中第一个数字表示整个Grid有多少个Block,方括号中第二个数字表示一个Block有多少个Thread。
实际上,线程(Thread)是一个编程上的软件概念。从硬件来看,Thread运行在一个CUDA核心上,多个Thread组成的Block运行在Streaming Multiprocessor(SM),SM的概念详见GPU软硬件介绍,多个Block组成的Grid运行在一个GPU显卡上。
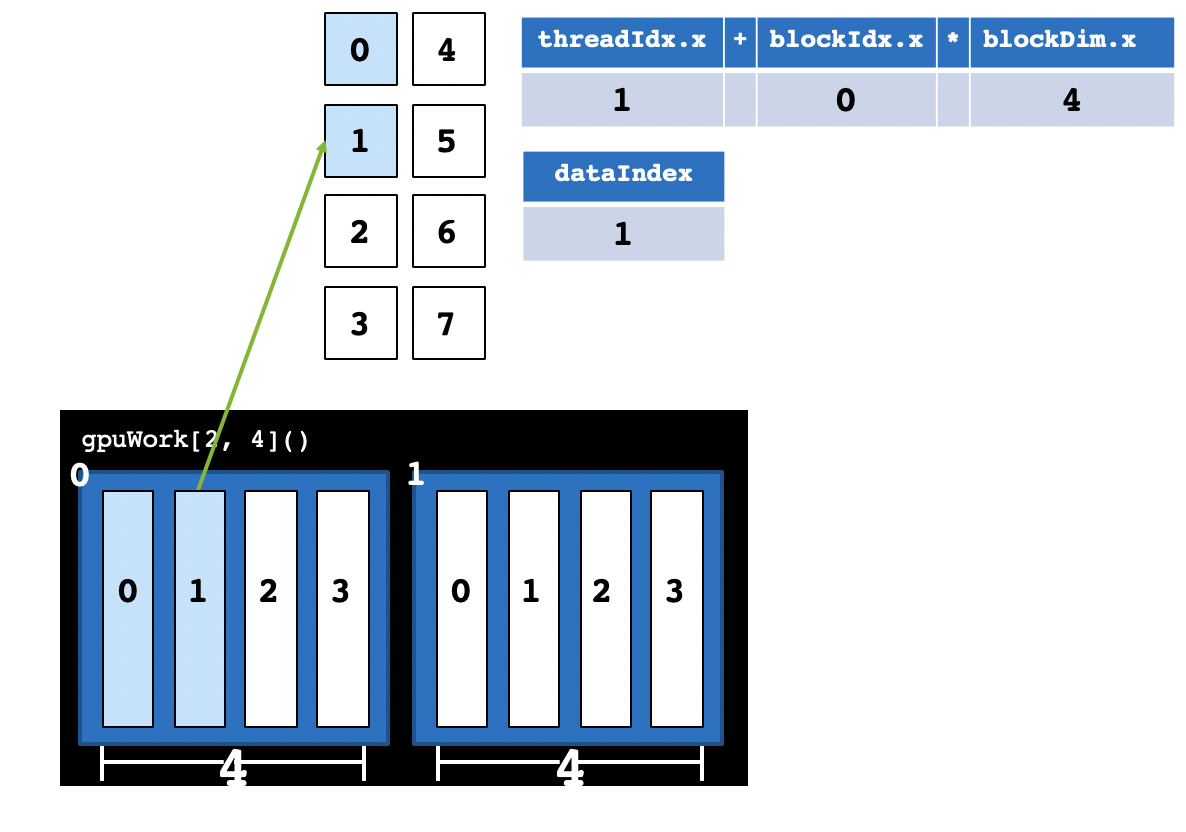
CUDA提供了一系列内置变量,以记录Thread和Block的大小及索引下标。以[2, 4]这样的配置为例:blockDim.x变量表示Block的大小是4,即每个Block有4个Thread,threadIdx.x变量是一个从0到blockDim.x - 1(4-1=3)的索引下标,记录这是第几个Thread;gridDim.x变量表示Grid的大小是2,即每个Grid有2个Block,blockIdx.x变量是一个从0到gridDim.x - 1(2-1=1)的索引下标,记录这是第几个Block。
用刚才小学生进行加法计算为例,我们把问题化简为共8个小学生参加本次计算任务,可以将这8个小学生分为2组,每组4人。整个Grid有2个Block,即gridDim.x为2,每组有4人,即blockDim.x为4。现在,如果大学教授分配计算任务,他希望让第2个(从0计数,该小学生实际编号为1号)小学生对1和2两个数字执行加法计算,那么大学教授必须要定位到第1号小学生,并通知1号小学生去取数字1和数字2来进行加法计算。如何定位第1号小学生呢?我们刚才定义,我们共有2组,一组有4人,编号为0-3。那么,1号小学生在第0组的1号位置,即1 + 0 * blockDim.x。

某个Thread在整个Grid中的位置编号为:threadIdx.x + blockIdx.x * blockDim.x。
利用上述变量,我们可以把之前的代码丰富一下:
from numba import cuda
def cpu_print(N):
for i in range(0, N):
print(i)
@cuda.jit
def gpu_print(N):
idx = cuda.threadIdx.x + cuda.blockIdx.x * cuda.blockDim.x
if (idx < N):
print(idx)
def main():
print("gpu print:")
gpu_print[2, 4](8)
cuda.synchronize()
print("cpu print:")
cpu_print(8)
if __name__ == "__main__":
main()
执行结果为:
gpu print:
0
1
2
3
4
5
6
7
cpu print:
0
1
2
3
4
5
6
7
这里的GPU函数在每个CUDA Thread中打印了当前Thread的编号,起到了CPU函数for循环同样的作用。因为for循环中的计算内容互相不依赖,也就是说,某次循环只是专心做自己的事情,循环第i次不影响循环第j次的计算,所以这样互相不依赖的for循环非常适合放到CUDA Thread里做并行计算。再次以小学生加法为例,不同小学生自己独立进行加法计算,对于小学生1号和小学生7号,无论是计算的输入还是输出结果都互相不影响。
注
在实际使用中,我们一般将CPU代码中互相不依赖的的for循环适当替换成CUDA代码。
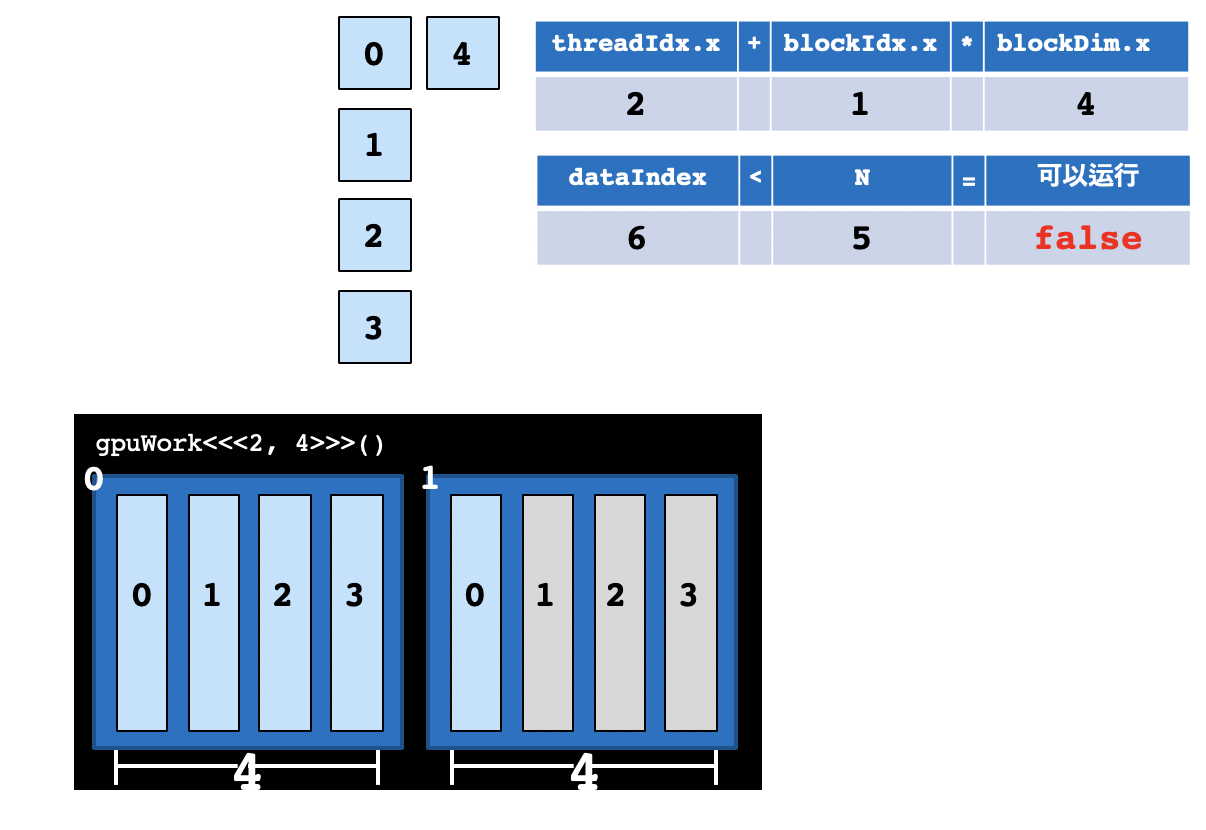
这份代码打印了8个数字,核函数有一个参数N,N = 8,假如我们只想打印5个数字呢?当前的执行配置共2 * 4 = 8个线程,线程数8与要执行的次数5不匹配,不过我们已经在代码里写好了if (idx < N)的判断语句,判断会帮我们过滤不需要的计算。我们只需要把N = 5传递给gpu_print函数中就好,CUDA仍然会启动8个Thread,但是大于等于N的Thread不进行计算。
相关信息
当线程数与计算次数不一致时,一定要使用这样的判断语句,以保证某个线程的计算不会影响其他线程的数据。
Block大小设置
不同的执行配置会影响GPU程序的速度,一般需要多次调试才能找到较好的执行配置,在实际编程中,执行配置[gridDim, blockDim]应参考下面的方法:
- Block运行在SM上,不同硬件架构(Turing、Volta、Pascal...)的CUDA核心数不同,一般需要根据当前硬件来设置Block的大小
blockDim(执行配置中第二个参数)。一个Block中的Thread数最好是32、128、256的倍数。注意,限于当前硬件的设计,Block大小不能超过1024。 - Grid的大小
gridDim(执行配置中第一个参数),即一个Grid中Block的个数可以由总次数N除以blockDim,并向上取整。
例如,我们想并行启动1000个Thread,可以将blockDim设置为128,1000 ÷ 128 = 7.8,向上取整为8。使用时,执行配置可以写成gpuWork[8, 128](),CUDA共启动8 * 128 = 1024个Thread,实际计算时只使用前1000个Thread,多余的24个Thread不进行计算。
注
这几个变量比较容易混淆,再次明确一下:blockDim是Block中Thread的个数,一个Block中的threadIdx最大不超过blockDim;gridDim是Grid中Block的个数,一个Grid中的blockIdx最大不超过gridDim。
以上讨论中,Block和Grid大小均是一维,实际编程使用的执行配置常常更复杂,Block和Grid的大小可以设置为二维甚至三维,如下图所示。这部分内容将在下篇文章中讨论。
内存分配
前文提到,GPU计算时直接从显存中读取数据,因此每当计算时要将数据从主存拷贝到显存上,用CUDA的术语来说就是要把数据从主机端拷贝到设备端。用小学生计算的例子来解释,大学教授需要将计算任务写在纸上,分发给各组小学生。CUDA强大之处在于它能自动将数据从主机和设备间相互拷贝,不需要程序员在代码中写明。这种方法对编程者来说非常方便,不必对原有的CPU代码做大量改动。
我们以一个向量加法为例,编写一个向量加法的核函数如下:
@cuda.jit
def gpu_add(a, b, result, n):
# a, b为输入向量,result为输出向量
# 所有向量都是n维
# 得到当前thread的编号
idx = cuda.threadIdx.x + cuda.blockDim.x * cuda.blockIdx.x
if idx < n:
result[idx] = a[idx] + b[idx]
初始化两个2千万维的向量,作为参数传递给核函数:
n = 20000000
x = np.arange(n).astype(np.int32)
y = 2 * x
gpu_result = np.zeros(n)
# CUDA执行配置
threads_per_block = 1024
blocks_per_grid = math.ceil(n / threads_per_block)
gpu_add[blocks_per_grid, threads_per_block](x, y, gpu_result, n)
把上述代码整合起来,与CPU代码做对比,并验证结果正确性:
from numba import cuda
import numpy as np
import math
from time import time
@cuda.jit
def gpu_add(a, b, result, n):
idx = cuda.threadIdx.x + cuda.blockDim.x * cuda.blockIdx.x
if idx < n:
result[idx] = a[idx] + b[idx]
def main():
n = 20000000
x = np.arange(n).astype(np.int32)
y = 2 * x
gpu_result = np.zeros(n)
cpu_result = np.zeros(n)
threads_per_block = 1024
blocks_per_grid = math.ceil(n / threads_per_block)
start = time()
gpu_add[blocks_per_grid, threads_per_block](x, y, gpu_result, n)
cuda.synchronize()
print("gpu vector add time " + str(time() - start))
start = time()
cpu_result = np.add(x, y)
print("cpu vector add time " + str(time() - start))
if (np.array_equal(cpu_result, gpu_result)):
print("result correct")
if __name__ == "__main__":
main()
运行结果,GPU代码竟然比CPU代码慢10+倍!
gpu vector add time 13.589356184005737
cpu vector add time 1.2823548316955566
result correct
说好的GPU比CPU快几十倍上百倍呢?这里GPU比CPU慢很多原因主要在于:
- 向量加法的这个计算比较简单,CPU的NumPy已经优化到了极致,无法突出GPU的优势,我们要解决实际问题往往比这个复杂得多,当解决复杂问题时,优化后的GPU代码将远快于CPU代码。
- 这份代码使用CUDA默认的统一内存管理机制,没有对数据的拷贝做优化。CUDA的统一内存系统是当GPU运行到某块数据发现不在设备端时,再去主机端中将数据拷贝过来,当执行完核函数后,又将所有的内存拷贝回主存。在上面的代码中,输入的两个向量是只读的,没必要再拷贝回主存。
- 这份代码没有做流水线优化。CUDA并非同时计算2千万个数据,一般分批流水线工作:一边对2000万中的某批数据进行计算,一边将下一批数据从主存拷贝过来。计算占用的是CUDA核心,数据拷贝占用的是总线,所需资源不同,互相不存在竞争关系。这种机制被称为流水线。这部分内容将在下篇文章中讨论。
原因2中本该程序员动脑思考的问题交给了CUDA解决,增加了时间开销,所以CUDA非常方便的统一内存模型缺点是计算速度慢。针对原因2,我们可以继续优化这个程序,告知GPU哪些数据需要拷贝到设备,哪些需要拷贝回主机。
from numba import cuda
import numpy as np
import math
from time import time
@cuda.jit
def gpu_add(a, b, result, n):
idx = cuda.threadIdx.x + cuda.blockDim.x * cuda.blockIdx.x
if idx < n :
result[idx] = a[idx] + b[idx]
def main():
n = 20000000
x = np.arange(n).astype(np.int32)
y = 2 * x
# 拷贝数据到设备端
x_device = cuda.to_device(x)
y_device = cuda.to_device(y)
# 在显卡设备上初始化一块用于存放GPU计算结果的空间
gpu_result = cuda.device_array(n)
cpu_result = np.empty(n)
threads_per_block = 1024
blocks_per_grid = math.ceil(n / threads_per_block)
start = time()
gpu_add[blocks_per_grid, threads_per_block](x_device, y_device, gpu_result, n)
cuda.synchronize()
print("gpu vector add time " + str(time() - start))
start = time()
cpu_result = np.add(x, y)
print("cpu vector add time " + str(time() - start))
if (np.array_equal(cpu_result, gpu_result.copy_to_host())):
print("result correct!")
if __name__ == "__main__":
main()
这段代码的运行结果为:
gpu vector add time 0.19940638542175293
cpu vector add time 1.132070541381836
result correct!
至此,可以看到GPU速度终于比CPU快了很多。
Numba对NumPy的比较友好,编程中一定要使用NumPy的数据类型。用到的比较多的内存分配函数有:
cuda.device_array(): 在设备上分配一个空向量,类似于numpy.empty()cuda.to_device():将主机的数据拷贝到设备
ary = np.arange(10)
device_ary = cuda.to_device(ary)
cuda.copy_to_host():将设备的数据拷贝回主机
host_ary = device_ary.copy_to_host()
高维执行配置
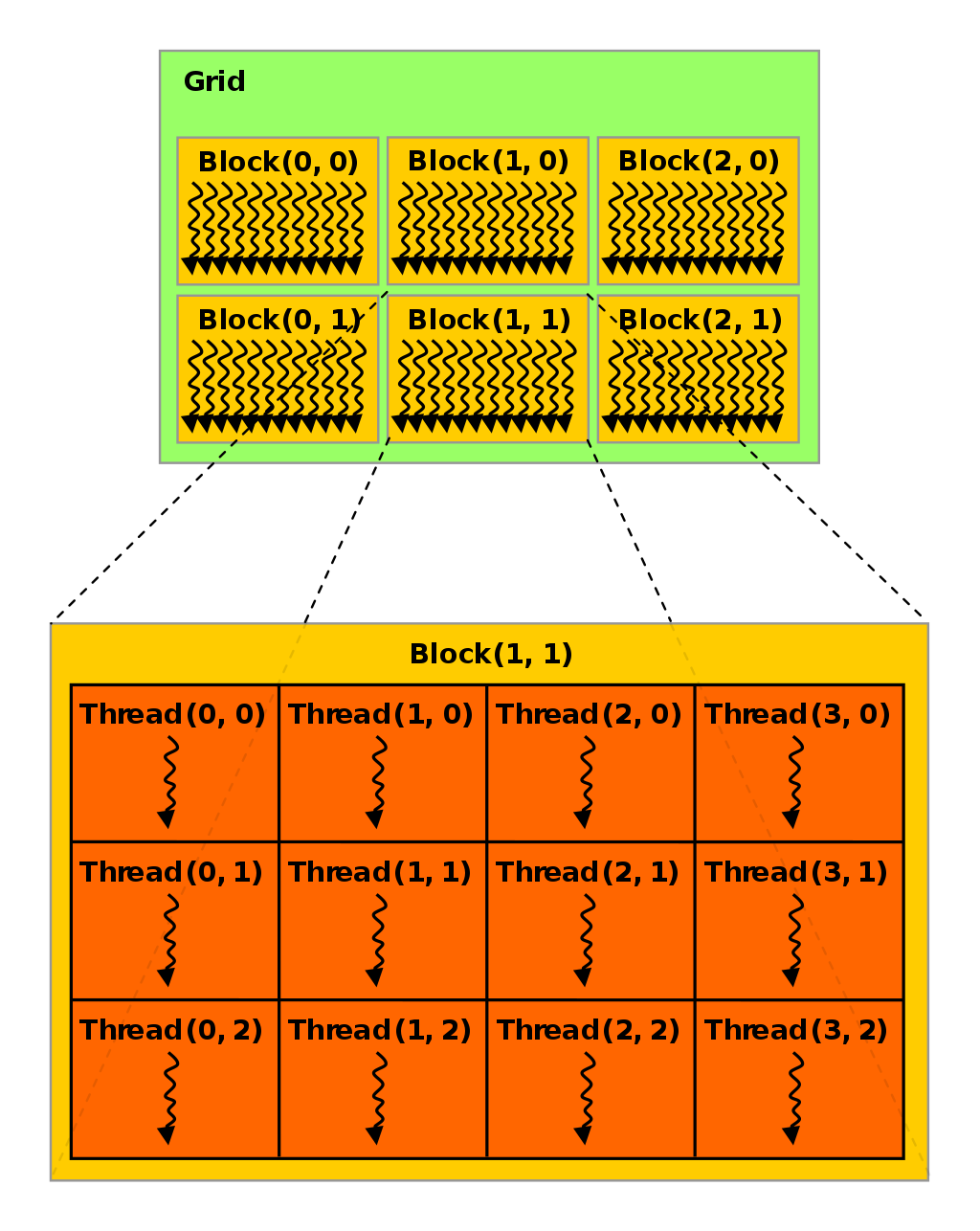
前文中,我们曾聊过如何使用threadIdx和blockIdx等参数来描述线程Thread的编号,我们之前使用的 threadIdx 和blockIdx变量都是一维的,实际上,CUDA允许这两个变量最多为三维。一维、二维和三维的大小配置可以适应向量、矩阵和张量等不同的场景。
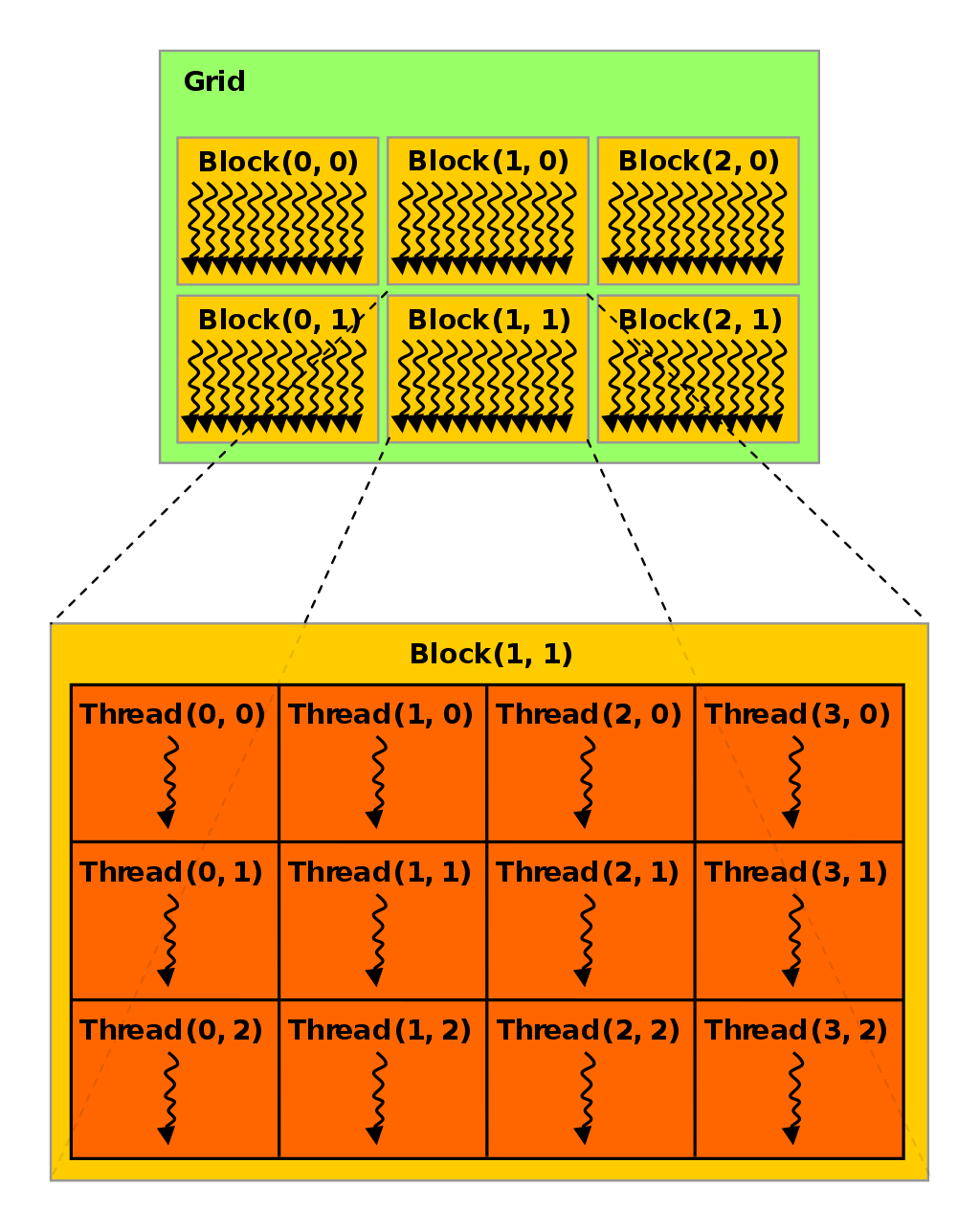
一个二维的执行配置如上图所示,其中,每个Block有(3 * 4)个Thread,每个Grid有(2 * 3)个Block。 二维块大小为 (Dx, Dy),某个线程号 (x, y) 的公式为 (x + y Dx);三维块大小为 (Dx, Dy, Dz),某个线程号*(x, y, z)* 的公式为 (x + y Dx + z Dx Dy)。各个内置变量中.x .y和.z为不同维度下的值。
例如,一个二维配置,某个线程在矩阵中的位置可以表示为:
col = cuda.threadIdx.y + cuda.blockDim.y * cuda.blockIdx.y
row = cuda.threadIdx.x + cuda.blockDim.x * cuda.blockIdx.x
如何将二维Block映射到自己的数据上并没有固定的映射方法,一般情况将.x映射为矩阵的行,将.y映射为矩阵的列。Numba提供了一个更简单的方法帮我们计算线程的编号:
row, col = cuda.grid(2)
其中,参数2表示这是一个2维的执行配置。1维或3维的时候,可以将参数改为1或3。
对应的执行配置也要改为二维:
threads_per_block = (16, 16)
blocks_per_grid = (32, 32)
gpu_kernel[blocks_per_grid, threads_per_block]
(16, 16)的二维Block是一个常用的配置,共256个线程。之前也曾提到过,每个Block的Thread个数最好是128、256或512,这与GPU的硬件架构高度相关。
小结
Python Numba库可以调用CUDA进行GPU编程,CPU端被称为主机,GPU端被称为设备,运行在GPU上的函数被称为核函数,调用核函数时需要有执行配置,以告知CUDA以多大的并行粒度来计算。使用GPU编程时要合理地将数据在主机和设备间互相拷贝。
CUDA编程的基本流程为:
- 初始化,并将必要的数据拷贝到GPU设备的显存上。
- 使用某个执行配置,以一定的并行粒度调用CUDA核函数。
- CPU和GPU异步计算。
- 将GPU计算结果拷贝回主机。