Shared Memory
我们知道,CPU和GPU组成异构计算架构,如果想从内存上优化程序,我们必须尽量减少主机与GPU设备间的数据拷贝,并将更多计算从主机端转移到GPU设备端,我们要尽量在设备端初始化数据,并计算中间数据,并尽量不做无意义的数据回写。
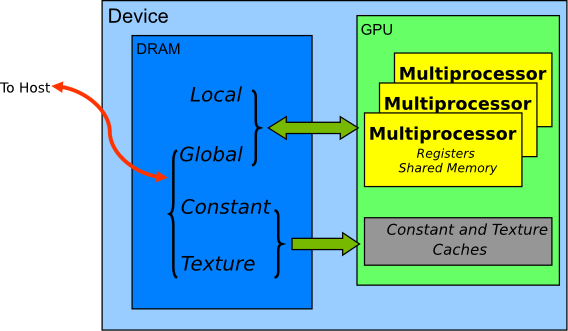
GPU的内存结构如图所示:GPU的计算核心都在Streaming Multiprocessor(SM)上,SM里有计算核心可直接访问的寄存器(Register)和共享内存(Shared Memory);多个SM可以读取显卡上的显存,包括全局内存(Global Memory)。每个SM上的Shared Memory相当于该SM上的一个缓存,一般都很小,Telsa V100的Shared Memory也只有96KB。注意,Shared Memory和Global Memory的字面上都有共享的意思,但是不要将两者的概念混淆,Shared Memory离计算核心更近,延迟很低;Global Memory是整个显卡上的全局内存,延迟高。
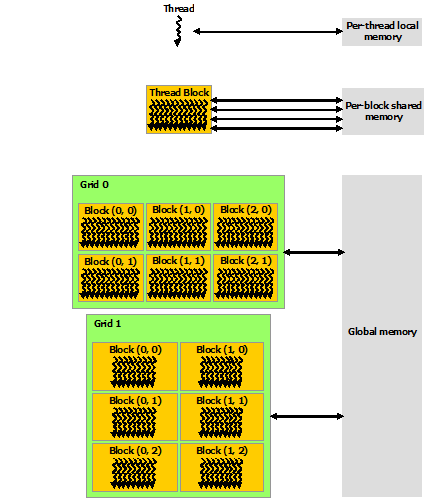
从软件角度来看,CUDA的线程可以访问不同级别的存储,每个Thread有独立的私有内存;每个Block中多个Thread都可以在该Block的Shared Memory中读写数据;整个Grid中所有Thread都可以读写Global Memory。Shared Memory的读写访问速度会远高于Global Memory。内存优化一般主要利用Shared Memory技术。下文将以矩阵乘法为例,展示如何使用Shared Memory来优化程序。
普通矩阵乘法
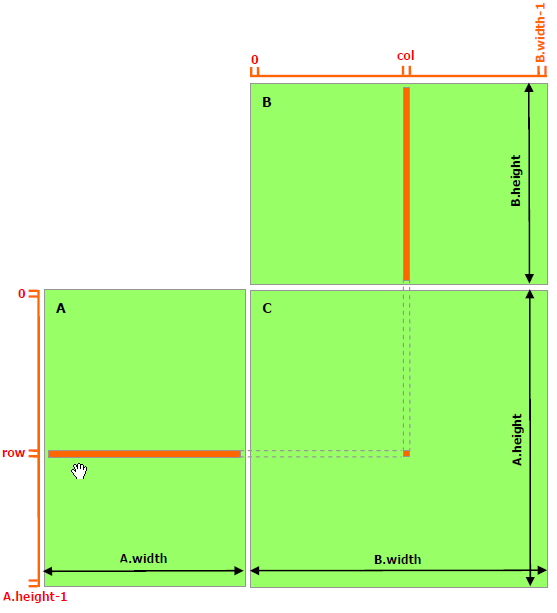
一个C = AB的矩阵乘法运算,需要我们把A的某一行与B的某一列的所有元素一一相乘,求和后,将结果存储到结果矩阵C的(row, col)上。在这种实现中,每个线程都要读取A的一整行和B的一整列,共计算M行*P列。以计算第row行为例,计算C[row, 0]、C[row, 1]...C[row, p-1]这些点时都需要从显存的Global Memory中把整个第row行读取一遍。可以算到,A矩阵中的每个点需要被读 B.width 次,B矩阵中的每个点需要被读 A.height 次。这样比较浪费时间。因此,可以将多次访问的数据放到Shared Memory中,减少重复读取的次数,并充分利用Shared Memory的延迟低的优势。
from numba import cuda
import numpy as np
import math
from time import time
@cuda.jit
def matmul(A, B, C):
""" 矩阵乘法 C = A * B
"""
# Numba库提供了更简易的计算方法
# x, y = cuda.grid(2)
# 具体计算公式如下
row = cuda.threadIdx.x + cuda.blockDim.x * cuda.blockIdx.x
col = cuda.threadIdx.y + cuda.blockDim.y * cuda.blockIdx.y
if row < C.shape[0] and col < C.shape[1]:
tmp = 0.
for k in range(A.shape[1]):
tmp += A[row, k] * B[k, col]
C[row, col] = tmp
def main():
# 初始化矩阵
M = 6000
N = 4800
P = 4000
A = np.random.random((M, N)) # 随机生成的 [M x N] 矩阵
B = np.random.random((N, P)) # 随机生成的 [N x P] 矩阵
start = time()
A = cuda.to_device(A)
B = cuda.to_device(B)
C_gpu = cuda.device_array((M, P))
# 执行配置
threads_per_block = (16, 16)
blocks_per_grid_x = int(math.ceil(A.shape[0] / threads_per_block[0]))
blocks_per_grid_y = int(math.ceil(B.shape[1] / threads_per_block[1]))
blocksPerGrid = (blocks_per_grid_x, blocks_per_grid_y)
# 启动核函数
matmul[blocksPerGrid, threads_per_block](A, B, C_gpu)
# 数据拷贝
C = C_gpu.copy_to_host()
cuda.synchronize()
print("gpu matmul time :" + str(time() - start))
start = time()
C_cpu = np.empty((M, P), np.float)
np.matmul(A, B, C_cpu)
print("cpu matmul time :" + str(time() - start))
# 验证正确性
if np.allclose(C_cpu, C):
print("gpu result correct")
if __name__ == "__main__":
main()
基于Shared Memory的矩阵乘法
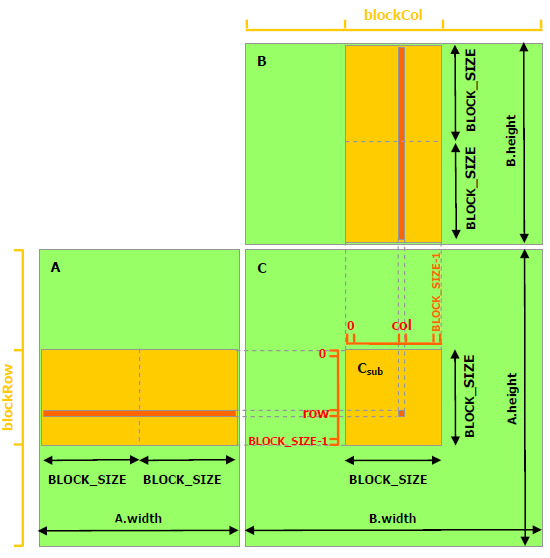
接下来的程序利用了Shared Memory来做矩阵乘法。这个实现中,跟未做优化的版本相同的是,每个Thread计算结果矩阵中的一个元素,不同的是,每个CUDA Block会以一个 BLOCK_SIZE * BLOCK_SIZE 子矩阵为基本的计算单元。具体而言,需要声明Shared Memory区域,数据第一次会从Global Memory拷贝到Shared Memory上,接下来可多次重复利用Shared Memory上的数据。
from numba import cuda, float32
import numpy as np
import math
from time import time
# thread per block
# 每个block有 BLOCK_SIZE x BLOCK_SIZE 个元素
BLOCK_SIZE = 16
@cuda.jit
def matmul(A, B, C):
""" 矩阵乘法 C = A * B
"""
row = cuda.threadIdx.x + cuda.blockDim.x * cuda.blockIdx.x
col = cuda.threadIdx.y + cuda.blockDim.y * cuda.blockIdx.y
if row < C.shape[0] and col < C.shape[1]:
tmp = 0.
for k in range(A.shape[1]):
tmp += A[row, k] * B[k, col]
C[row, col] = tmp
@cuda.jit
def matmul_shared_memory(A, B, C):
"""
使用Shared Memory的矩阵乘法 C = A * B
"""
# 在Shared Memory中定义向量
# 向量可被整个Block的所有Thread共享
# 必须声明向量大小和数据类型
sA = cuda.shared.array(shape=(BLOCK_SIZE, BLOCK_SIZE), dtype=float32)
sB = cuda.shared.array(shape=(BLOCK_SIZE, BLOCK_SIZE), dtype=float32)
tx = cuda.threadIdx.x
ty = cuda.threadIdx.y
row = cuda.threadIdx.x + cuda.blockDim.x * cuda.blockIdx.x
col = cuda.threadIdx.y + cuda.blockDim.y * cuda.blockIdx.y
if row >= C.shape[0] and col >= C.shape[1]:
# 当(x, y)越界时退出
return
tmp = 0.
# 以一个 BLOCK_SIZE x BLOCK_SIZE 为单位
for m in range(math.ceil(A.shape[1] / BLOCK_SIZE)):
sA[tx, ty] = A[row, ty + m * BLOCK_SIZE]
sB[tx, ty] = B[tx + m * BLOCK_SIZE, col]
# 线程同步,等待Block中所有Thread预加载结束
# 该函数会等待所有Thread执行完之后才执行下一步
cuda.syncthreads()
# 此时已经将A和B的子矩阵拷贝到了sA和sB
# 计算Shared Memory中的向量点积
# 直接从Shard Memory中读取数据的延迟很低
for n in range(BLOCK_SIZE):
tmp += sA[tx, n] * sB[n, ty]
# 线程同步,等待Block中所有Thread计算结束
cuda.syncthreads()
# 循环后得到每个BLOCK的点积之和
C[row, col] = tmp
def main():
# 初始化矩阵
M = 6000
N = 4800
P = 4000
A = np.random.random((M, N)) # 随机生成的 [M x N] 矩阵
B = np.random.random((N, P)) # 随机生成的 [N x P] 矩阵
A_device = cuda.to_device(A)
B_device = cuda.to_device(B)
C_device = cuda.device_array((M, P)) # [M x P] 矩阵
# 执行配置
threads_per_block = (BLOCK_SIZE, BLOCK_SIZE)
blocks_per_grid_x = int(math.ceil(A.shape[0] / BLOCK_SIZE))
blocks_per_grid_y = int(math.ceil(B.shape[1] / BLOCK_SIZE))
blocks_per_grid = (blocks_per_grid_x, blocks_per_grid_y)
start = time()
matmul[blocks_per_grid, threads_per_block](A_device, B_device, C_device)
cuda.synchronize()
print("matmul time :" + str(time() - start))
start = time()
matmul_shared_memory[blocks_per_grid, threads_per_block](A_device, B_device, C_device)
cuda.synchronize()
print("matmul with shared memory time :" + str(time() - start))
C = C_device.copy_to_host()
if __name__ == "__main__":
main()
进行Shared Memory优化后,计算部分的耗时减少了近一半:
matmul time :1.4370720386505127
matmul with shared memory time :0.7994928359985352
在上面的实现过程中,有些地方也比较容易让人迷惑。
声明Shared Memory。这里使用了
cuda.shared.array(shape,type),shape为这块数据的向量维度大小,type为Numba数据类型,例如是int32还是float32。这个函数只能在设备端使用。定义好后,这块数据可被同一个Block的所有Thread共享。需要注意的是,这块数据虽然在核函数中定义,但它不是单个Thread的私有数据,它可被同Block中的所有Thread读写。数据加载。每个Thread会将A中的一个元素加载到sA中,一个Block的 BLOCK_SIZE x BLOCK_SIZE 个Thread可以把sA填充满。
cuda.syncthreads()会等待Block中所有Thread执行完之后才执行下一步。所以,当执行完这个函数的时候,sA和sB的数据已经拷贝好了。数据复用。A中的某个点,只会被读取 B.width / BLOCK_SIZE 次;B中的某个点,只会被读 A.height / BLOCK_SIZE 次。
for n in range(BLOCK_SIZE)这个循环做子矩阵向量乘法时,可多次复用sA和sB的数据。子矩阵的数据汇总。我们以一个 BLOCK_SIZE x BLOCK_SIZE 的子矩阵为单位分别对A从左到右,对B从上到下平移并计算,共循环 A.width / BLOCK_SIZE 次。在某一步平移,会得到子矩阵的点积。
for m in range(math.ceil(A.shape[1] / BLOCK_SIZE))这个循环起到了计算A从左到右与B从上到下点积的过程。